研究室の活動内容
知能システム研究室では,研究グループごとに週間研究報告会を週1回実施します。報告会では先週までの実施内容と問題点等を報告します。問題点や疑問点などをこの報告会で検討・議論し来週までに行うことを決定します。また研究報告書に基づき、実験データ解析、提案する方法の考えや原理の説明および実験で明らかになった問題点などを検討していき次週までの実施内容を決めていきます。
研究理論や使用するプログラム開発の基礎を身につけるため、「専門ゼミ」と呼んでいる勉強会も併せて実施しています。2025年度実施のゼミは「自動車ゼミ(モデル予測制御理論)」、「ロボット制御およびSLAM関連ゼミ」を実施しています。
研究グループは、(G1) 障害物回避制御法および群ロボットフォーメーション制御法,(G2) Hybrid Electric Vehicle(HEV)駆動部制御と運転動作に依存する車速予測モデル設計特性,(G3) 操作者の特性を考慮可能なHITLS(Human-in-the-Loop System)開発,(G4) フォーメーション制御を実施しています。
学部生は修士学生と共にグループごとに実験装置の操作方法,制御・動画像処理プログラム開発,動作アルゴリズムの理論の理解および、データ解析と報告書作成方法を習得しながら卒業研究を行っていきます。修士課程では,卒業研究での問題を発展させて,従来法ではうまくいかない点に対して新しい方法を提案し,実験を通して有効性を示していきます。8月初旬に研究中間報告会を行い,前期までの研究成果を発表します。
学外発表:修士1年で前半に1回・後半に1回の合計2回,修士2年で国際学会1回を含む2回から3回の発表を目標に実施しています。
学会発表情報に研究活動の詳細が掲載されています。
知能システム研究室では以下のゼミ・研究報告会を行っています。
研究報告会(週1回)研究グループごとの研究ゼミナール(B4学生+修士学生)(各テーマ隔週)
- SLAM/自己位置推定・予測およびロボット制御関連ゼミ)
- モデル予測制御(MPC)およびインバータ関連ゼミ
- フォーメーション、群ロボットゼミ
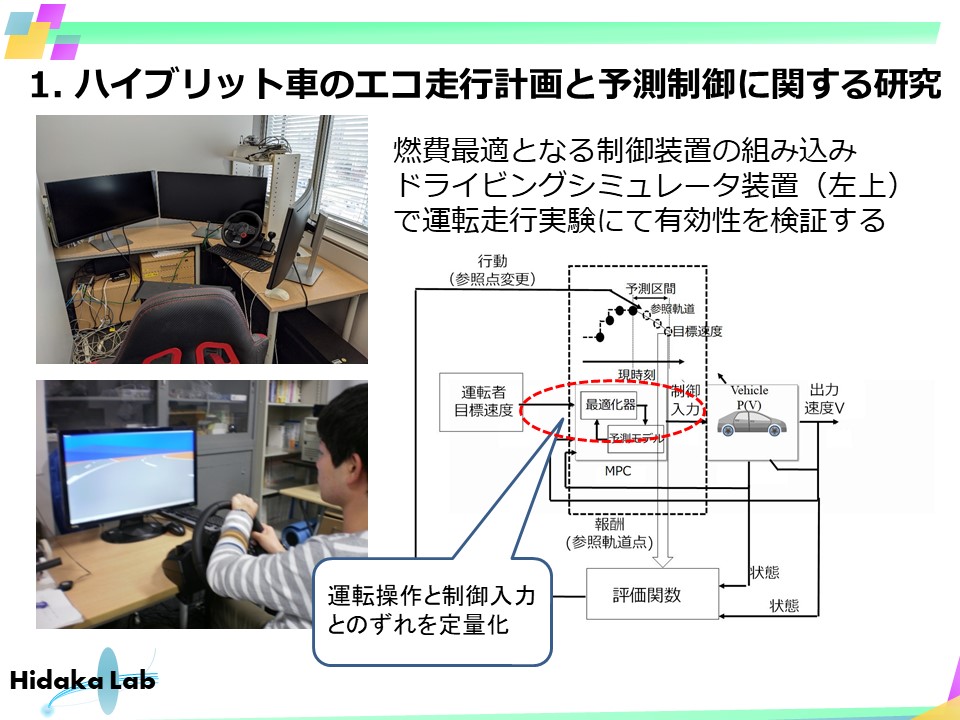
ハイブリット車(HEV),プラグインハイブリット車(PHV)および電気自動車(EV)など電気モータが駆動部に使用されている自動車の燃費最適化/高効率運動を可能とする,制御アルゴリズムに関する研究を実施しています。HEVでは,エンジンとモータが同時に駆動部に加わるため,制御則の設計や制御パラメータの選択により燃費が大きく変化します。そこで本研究では,制御対象のモデルを求めモデルに基づいた設計法を基礎として研究中です。HEVやEVの駆動部データで重要な値である充電率(SOC),燃費を評価関数とし制御パラメータを利用したデータ駆動型設計法を提案しています。
我々の研究室ではこれまで駆動部のダイナミクスが車速に依存することを考慮したLPV(Linear Parameter Varying)モデルをモデル予測制御(MPC)に利用した制御法を提案してきています。
さらに、SOCモデルの非線形特性を陽に考慮し、それ以外のエンジンとモータおよびジェネレータ各駆動部をLPVモデルで表現し非線形MPCを利用する駆動部制御法の研究も実施しています。MATLAB/Simulinkで提供されているHEVシミュレータによる提案法の有効性の検討だけでなく,市街地走行を行うドライビングシミュレータを利用した走行実験での有効性の検討も実施しています。
また、運転者による燃費性能低下を防ぐため、運転者が自然に燃費最適走行を実現できるHILを考慮した駆動部制御設計、および操作者の操作は非線形特性と考え、短時間前のデータ入力から1秒先の動作予測を行う予測モデル設計にLong Short Term Memory(LSTM)を利用した設計法を研究中です。現状は全データの80%を学習テストとして学習を行い、残り20%で性能評価を行い,正解率が約90%の結果を得ています。


室内および屋外を自立して移動可能な運搬ロボットの制御方法の開発を実施中です。現在の室内運搬ロボットはAuto Guided Vehicle(AGV)と呼ばれている床面に磁気テープ等を敷設した移動経路追従型が主流となっています。この方法は制御設計が容易である反面,柔軟に経路変更をすることが難しい問題点があります。そこで物流倉庫等では,Autonomous Mobile Robot(AMR)と呼ばれる自律走行運搬ロボットが稼働し始めています。
我々の研究室は,3次元空間を観測できる深度カメラやステレオカメラと2次元空間データの取得が可能なレーザーレンジ(LRF)を組み合わせて環境認識を行い,目的地点へ自動で移動可能な運搬ロボット制御法を研究中です。
3次元環境地図作成にはSLAM技術を応用し、工場内など作業者との共有した空間で安全確実に動かすためにロボットに搭載されたセンサを利用した自動回避動作方法とその制御方法を研究中です。さらに、ショッピングモール、空港や商店街などのような、多くの歩行者が存在する環境では対象者により回避動作を変えるほうが「人に優しい」回避になると考え、気遣いを考慮する回避動作を組み込んだ回避制御法も研究しています。
人工ポテンシャル法での障害物回避(左)および実機実験結果

柔軟なレイアウト変更が可能であるインテリジェント生産システムの構築を目指して、自己位置推定と環境地図の同時作成(SLAM)を室内運搬ロボットへ応用することを目指しています。現在はセンサベース+フロンティアベースを融合した自律型SLAMを提案し、工場内を想定した環境での有効性を確認しています。
また工場のレイアウト変更に伴う環境地図変更などを想定し、時間制約付きSLAMに対して複数ロボットの協調型SLAMや,施工ロボットの自立化に応用するため建物などの構造情報を組み込むことで位置精度を向上させるVisual SLAMの研究を実施しています。さらに、群ロボット制御を利用して効率的な環境地図作成を行うため、自由に群形成をさせて移動させる群ロボットの拡散法についての研究も実施しています。
左:従来法,右:提案法
リーダーフォロワー制御に基づくフォーメーション制御を点検・探査動作を行うシステムに応用することを目的として、研究を行っています。対象はドローン(UAV)で、制御目的は人が操作するリーダUAVに対して、複数のフォロワーUAVは自立でフォーメーション形成を保持しながら移動と衝突回避を行うシステム構築です。シミュレーションによる提案法の有効性の確認と共に、小型ドローンを利用した実験での検討を行い、操作しやすいシステム設計開発を目指しています。
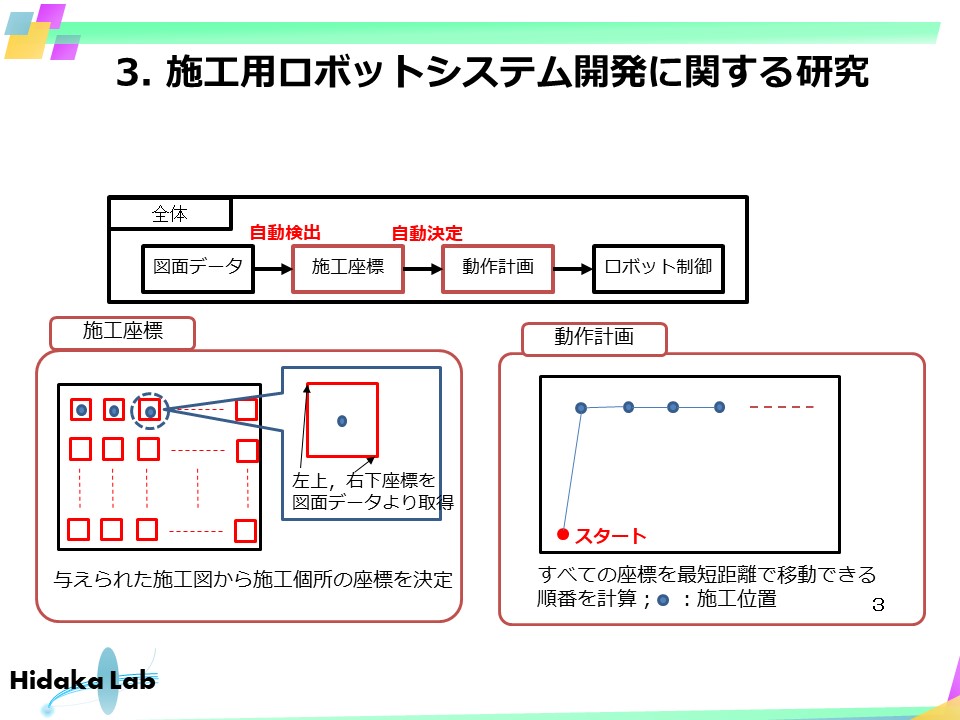
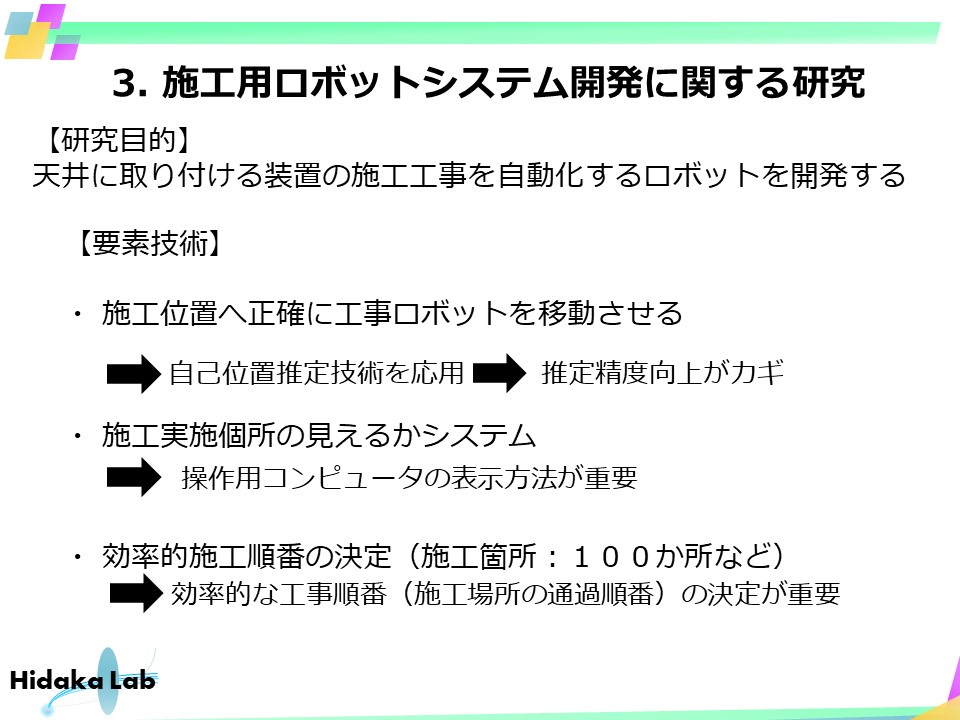
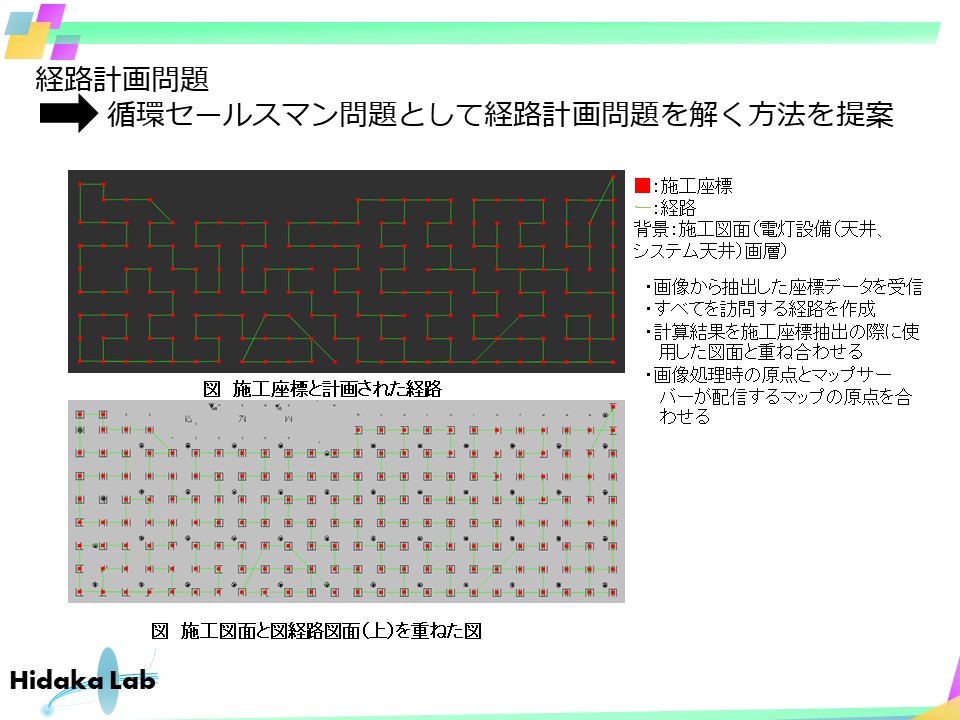
研究目的は,「天井に取り付ける装置の施工工事を自動化するロボットの開発」です。このシステムでの要素技術としては、1) 施工位置へ正確に工事ロボットを移動させる技術,2) 施工実施個所の「見えるか」システムの構築,3) 効率的施工順番の決定技術,があります。1) に対しては建物の構造線を利用する Structure SLAMの応用を行います。3) の技術では,巡回セールスマン問題に帰着して解くことを行います。なお、最短経路計算に環境情報(壁面など)を組み込むため,ボロノイ図を利用して通過可能経路への修正を行います。
移動ロボットと同じくSLAM技術を応用して,GPSが利用できない環境でも飛行可能なUAV制御設計および設計に必要なモデリング技術の研究を行っています。モデリングではホバリング状態と移動状態という2状態に対して数式モデルを構築するため、閉ループ同定に基づく2段階モデリング法を提案しています。制御方法では,非線形性を考慮できかつロバスト性を有するスライディングモード制御をベースとしたビジュアルサーボ設計を検討しています。
UAV飛行実験
自動車運転中の運転者の頭部計測装置の開発を行っています。計測装置には,非接触型デバイスとして,ステレオカメラを利用します。顔の移動追跡にはパーティクルフィルターを利用し,計測の特徴点である両目および口を追跡し,この3点より得られる平面ベクトルを利用して顔の変化角度を計測する方法を装置に組み込みます。また,計測対象の顔領域決定の自動化には,EHOGを利用し,輝度外乱にロバストな認識を組み入れて,計測の自動化を目指しています。その他,EHOGを応用した運搬ロボットのロバスト経路探査法など,動画像での物体認識方法の提案も併せて行っています。
頭部計測動画(ロール・ピッチ・ヨー角)
遠隔操作者が操作しやすいための補助とは何か、どのような補助が操作にとって有益であるか、を実験データと共に検討を行っていきます。対象の遠隔操作ロボットは2輪独立型車輪ロボットであり、操作に必要な動作環境は全方位カメラ画像を利用しています。この画像を通常のカメラ画像へ変換することで、左右前後の状況を1台のカメラで見ることが可能としています。現在はAR(拡張実現)を利用し安全領域を考慮した通過可能空間壁の表示や進行方向情報表示を作成中です。
遠隔操作実験風景
走行状態を再現するステレオ音響開発および環境ノイズ除去装置を利用して,運転操作実験環境の構築を目指しています。そのために,室内環境ノイズの低減を行う必要があります。そこで本研究ではアダプティブフィルターを利用した消音装置のため,音源と被験者までのチャネル推定をシステムモデリング手法を応用して設計を行います。従来のシステムモデリングでは,テスト信号としてランダム信号が使われかつ複数実験が必要でした。そこで,本研究ではFictitious Reference Iterative Tuning (FRIT)をチャネル推定に応用し,モデル設計実験回数低減を提案します。
本研究では制御設計に必要なモデリング設計の研究を行っています。今までに,車載カメラを利用した自動制御設計のモデリングおよび室内運搬ロボットのモデリングを実施してきました。今後は,4軸ヘリコプターや2輪倒立ロボットなど不安定制御系のモデリングとモデルに基づくロバスト制御設計についての研究を実施します。本研究では主に制御ソフトウェアのMATLABを使用し,シミュレーションと実験を同時に行い,提案法の有効性を検討していきます。
| 2026年度 | 学会参加等について掲載していきます |
| 2025年度 | 学会参加等について掲載していきます |
| 2024年度 | 学会参加等について掲載していきます |